|
RobWorkProject
23.9.11-
|
|
RobWorkProject
23.9.11-
|
Parameterization of a strategy that searches for a hole using a spiral strategy. More...
Classes | |
| class | SpiralParameterization |
| Parameterization of a strategy that searches for a hole using a spiral strategy. More... | |
Namespaces | |
| rw | |
| Deprecated namespace since 16/4-2020 for this class. | |
| rw::core | |
| Most basic types for RobWork. | |
| rwlibs | |
| Extension libraries for RobWork. | |
| rwlibs::assembly | |
| Assembly strategies and task & result formats for assembly operations. | |
Parameterization of a strategy that searches for a hole using a spiral strategy.
The following illustration shows the spiral motion performed using the spiral strategy. The blue point shows the initial location of the one end of the peg, while the red spiral shows the opposite end of the peg. During the spiral motion, the peg will gradually go from vertical to more and more horizontal. At the same time, the one end of the peg will remain on the same vertical line compared to the hole.
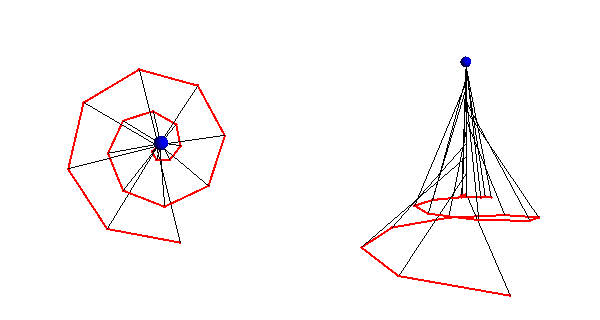
performed with the peg to search for hole."
The strategy is parameterized using the following parameters:
| Parameter | Description | Units | Units in PropertyMap | | --------------— | ------------------------------------------------------------------------— | ----------------— | -----------------— | | r | The spiral radius. | \(\frac{m}{rad}\) | \(\frac{mm}{rad}\) | | n | Number of turns. | | | | \(l_{peg}\) | Length from end of peg to the point where rotation occurs (the blue point). | m | mm | | \(l_{push}\) | Offset of the peg in the z-direction. | m | mm | | \(l_{start}\) | Offset of the peg in the z-direction for the approach pose. | m | mm | | \(d_{success}\) | Depth in hole where insertion is considered successful. | m | mm | | v | Speed of motion. | \(\frac{m}{s}\) | \(\frac{mm}{s}\) | | \(\Delta d\) | Discretization of spiral. | rad | rad | | \(f_{max}\) | Maximum force allowed before strategy is aborted. | N | N |