|
RobWorkProject
23.9.11-
|
|
RobWorkProject
23.9.11-
|
Parameterization of a Peg in Hole action, used by the PiHStrategy. More...
#include <rw/core/Ptr.hpp>#include <rw/math/Q.hpp>#include <rwlibs/assembly/AssemblyParameterization.hpp>Classes | |
| class | PiHParameterization |
| Parameterization of a Peg in Hole action, used by the PiHStrategy. More... | |
Namespaces | |
| rw | |
| Deprecated namespace since 16/4-2020 for this class. | |
| rw::core | |
| Most basic types for RobWork. | |
| rwlibs | |
| Extension libraries for RobWork. | |
| rwlibs::assembly | |
| Assembly strategies and task & result formats for assembly operations. | |
Parameterization of a Peg in Hole action, used by the PiHStrategy.
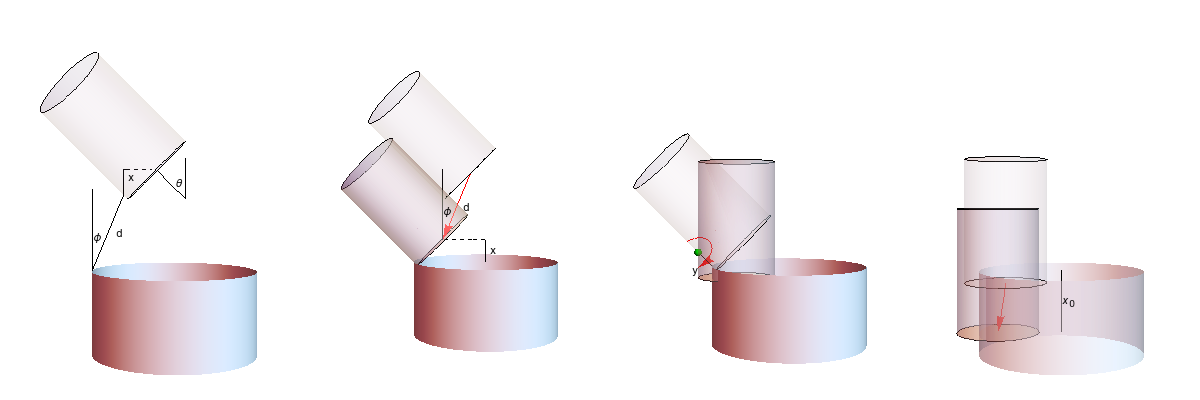
image shows the initial approach pose, second image shows the linear approach motion, third image shows the angular motion, and the right image shows the final linear insertion."
The strategy is parameterized using the following parameters:
| Parameter | Description | Units | Units in PropertyMap | | --------------— | -------------------------------------------------------------------------------— | ----------------— | -----------------— | | \(r_{hole}\) | Radius of the hole. | m | mm | | \(r_{peg}\) | Radius of the peg. | m | mm | | \(\theta\) | The angle between the peg and hole axes. Zero corresponds to a straight insertion. | rad | rad | | \(\phi\) | The approach angle. | rad | rad | | x | Height of the peg end point above the hole. | m | mm | | y | The distance to the rotation point. | m | mm | | d | The approach distance. | m | mm | | \(x_0\) | The insertion depth. | m | mm |
The strategy and parameters are also described in the article [1].
[1]: Lars Carøe Sørensen, Jacob Pørksen Buch, Henrik Gordon Petersen and Dirk Kraft, Online Action Learning using Kernel Density Estimation for Quick Discovery of Good Parameters for Peg-in-Hole Insertion, In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016), Volume 2, pages 166-177