|
RobWorkProject
23.9.11-
|
|
RobWorkProject
23.9.11-
|
Control strategy for a Peg in Hole operation. More...
#include <PiHStrategy.hpp>
Inherits AssemblyControlStrategy.
Public Member Functions | |
| PiHStrategy (const rw::math::Transform3D<> &worldTfemale, const rw::math::Transform3D<> &femaleTfemaleTcp=rw::math::Transform3D<>::identity(), const rw::math::Transform3D<> &maleTmaleTcp=rw::math::Transform3D<>::identity()) | |
| Constructor. More... | |
| virtual | ~PiHStrategy () |
| Destructor. | |
| ControlState::Ptr | createState () const |
| Create a new ControlState. This is usually done before calling update() the first time. More... | |
| virtual rw::core::Ptr< AssemblyControlResponse > | update (rw::core::Ptr< AssemblyParameterization > parameters, rw::core::Ptr< AssemblyState > real, rw::core::Ptr< AssemblyState > assumed, ControlState::Ptr controlState, rw::kinematics::State &state, rw::sensor::FTSensor *ftSensor, double time) const |
| The main control loop. More... | |
| virtual rw::math::Transform3D | getApproach (rw::core::Ptr< AssemblyParameterization > parameters) |
| Get the initial relative configuration between female and male objects (uses object TCP frames as given in the AssemblyTask). More... | |
| virtual std::string | getID () |
| All implementations should provide a unique id, which will be used for serialization and in the factory. More... | |
| virtual std::string | getDescription () |
| A textual description of the control strategy. More... | |
| virtual rw::core::Ptr< AssemblyParameterization > | createParameterization (const rw::core::Ptr< rw::core::PropertyMap > map) |
| Construct a parameterization from a PropertyMap - this is required for deserialization and loading of a Assemblyassembly. More... | |
 Public Member Functions inherited from AssemblyControlStrategy Public Member Functions inherited from AssemblyControlStrategy | |
| AssemblyControlStrategy () | |
| Create new control strategy. | |
| virtual | ~AssemblyControlStrategy () |
| Destructor. | |
| virtual rw::core::Ptr< AssemblyControlResponse > | update (rw::core::Ptr< AssemblyParameterization > parameters, rw::core::Ptr< AssemblyState > real, rw::core::Ptr< AssemblyState > assumed, ControlState::Ptr controlState, rw::kinematics::State &state, rw::sensor::FTSensor *ftSensor, double time) const =0 |
| The main control loop. More... | |
Additional Inherited Members | |
| Public Types inherited from AssemblyControlStrategy | |
| typedef rw::core::Ptr< AssemblyControlStrategy > | Ptr |
| smart pointer type to this class | |
Control strategy for a Peg in Hole operation.
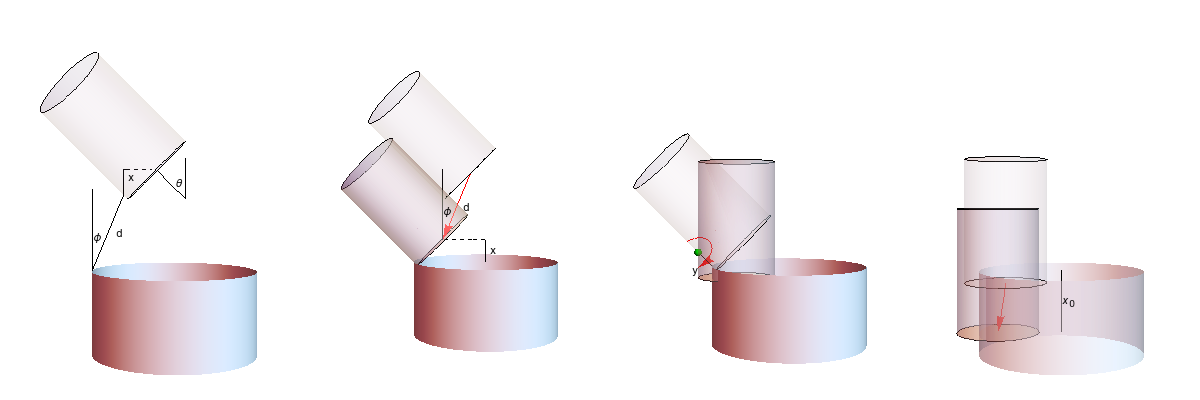
image shows the initial approach pose, second image shows the linear approach motion, third image shows the angular motion, and the right image shows the final linear insertion."
See the PiHParameterization for more information about the parameters.
The strategy is described in [1].
[1]: Lars Carøe Sørensen, Jacob Pørksen Buch, Henrik Gordon Petersen and Dirk Kraft, Online Action Learning using Kernel Density Estimation for Quick Discovery of Good Parameters for Peg-in-Hole Insertion, In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016), Volume 2, pages 166-177
| PiHStrategy | ( | const rw::math::Transform3D<> & | worldTfemale, |
| const rw::math::Transform3D<> & | femaleTfemaleTcp = rw::math::Transform3D<>::identity(), |
||
| const rw::math::Transform3D<> & | maleTmaleTcp = rw::math::Transform3D<>::identity() |
||
| ) |
Constructor.
This strategy generates trajectories in world coordinates, assuming the hole body is stationary. Hence it must be given the transform of the hole body.
| worldTfemale | [in] the transform of the hole body. |
| femaleTfemaleTcp | [in] (optional) if the hole body frame does is not at the top of the hole, the transform from the body frame to the top of the hole should be given here. |
| maleTmaleTcp | [in] (optional) if the peg body frame does is not at the end of the peg towards the hole, the transform from the body frame to the end of the peg should be given here. |
|
virtual |
Construct a parameterization from a PropertyMap - this is required for deserialization and loading of a Assemblyassembly.
| map | [in] the PropertyMap to construct a parameterization from. |
Implements AssemblyControlStrategy.
|
virtual |
Create a new ControlState. This is usually done before calling update() the first time.
Reimplemented from AssemblyControlStrategy.
|
virtual |
Get the initial relative configuration between female and male objects (uses object TCP frames as given in the AssemblyTask).
First when approach is reached, the update() control loop will start running.
| parameters | [in] the parameters used for the current task. |
Implements AssemblyControlStrategy.
|
virtual |
A textual description of the control strategy.
Implements AssemblyControlStrategy.
|
virtual |
All implementations should provide a unique id, which will be used for serialization and in the factory.
Implements AssemblyControlStrategy.
|
virtual |
The main control loop.
| parameters | [in] the parameters used for the current task. |
| real | [in] the real AssemblyState (can be NULL if not known). |
| assumed | [in] the assumed AssemblyState (should be set by the AssemblyControlStrategy). |
| controlState | [in] a ControlState previously created by the createState() function. |
| state | [in] the real state of the system. |
| ftSensor | [in] a pointer to the male force/torque sensor. |
| time | [in] the current time. |