|
RobWorkProject
23.9.11-
|
|
RobWorkProject
23.9.11-
|
Dialog for configuration of an assembly task. More...
Classes | |
| class | TaskSetupDialog |
| Dialog for configuration of an assembly task. More... | |
Namespaces | |
| rw | |
| Deprecated namespace since 16/4-2020 for this class. | |
| rw::core | |
| Most basic types for RobWork. | |
| rw::models | |
| Workcell and device models. | |
| rwlibs | |
| Extension libraries for RobWork. | |
| rwlibs::assembly | |
| Assembly strategies and task & result formats for assembly operations. | |
| rws | |
| RobWorkStudio is the visualization framework of RobWork. | |
| rwslibs | |
| RobWorkStudio extension libraries. | |
Dialog for configuration of an assembly task.
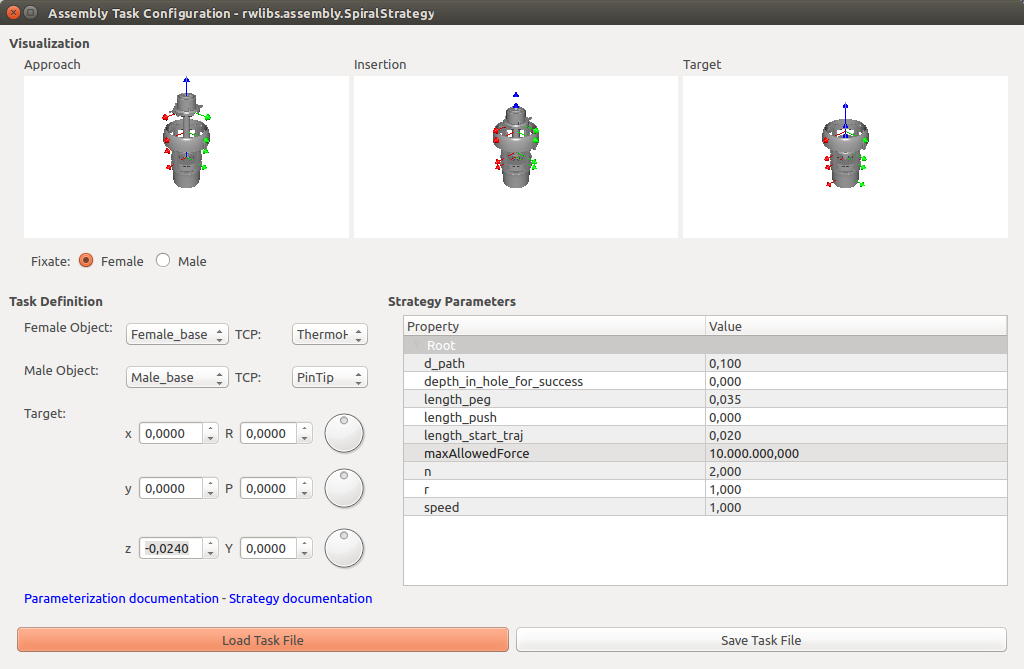
case for the rwlibs::assembly::SpiralStrategy ."
A workcell with at least two objects is needed to set up an assembly task. The approach and target views show the transforms between the objects at the beginning and end of the strategy. The target transform is set under the task definition section, while the approach is depdendent on the strategy parameters, which are specific to the chosen strategy. The insertion view shows an animation of the objects being assembled as specified by the strategy. Notice that this is a kinematic simulation only. This means that the objects can penetrate, no dynamics is calculated, and the force/torque sensors will appear as measuring zero force at all times.
It is possible to load and save the final definition of the task. This can then later work as the input to a dynamic simulation of the assembly procedure.