|
RobWorkProject
23.9.11-
|
|
RobWorkProject
23.9.11-
|
Plugin for visualization of assembly operations. More...
#include <ATaskVisPlugin.hpp>
Inherits RobWorkStudioPlugin, and ATaskVisPlugin.
Public Member Functions | |
| ATaskVisPlugin () | |
| Constructor. | |
| virtual | ~ATaskVisPlugin () |
| Destructor. | |
| virtual void | open (rw::models::WorkCell *workcell) |
| called when a workcell is opened More... | |
| virtual void | initialize () |
| When the RobWorkStudio instance is valid, the ATaskVisPlugin will subscribe to events received from the PlayBack plugin. | |
 Public Member Functions inherited from RobWorkStudioPlugin Public Member Functions inherited from RobWorkStudioPlugin | |
| RobWorkStudioPlugin (const QString &name, const QIcon &icon) | |
| constructor of the plugin interface More... | |
| virtual void | close () |
| called when a workcell is being closed. | |
| virtual QString | name () const |
| name that describe the plugin instance | |
| virtual void | setupMenu (QMenu *menu) |
| sets up the menu with this plugin More... | |
| virtual void | setupToolBar (QToolBar *toolbar) |
| setsup a toolbar with the actions of this plugin More... | |
| virtual void | setRobWorkStudio (RobWorkStudio *studio) |
| sets the RobWorkStudio instance of the plugin. Normally only done on construction. | |
| virtual RobWorkStudio * | getRobWorkStudio () |
| returns a handle to the RobWorkStudio instance | |
| virtual void | setRobWorkInstance (rw::core::RobWork::Ptr robwork) |
| Sets the RobWork instance to be used by the plugin. More... | |
| virtual rw::core::RobWork::Ptr | getRobWorkInstance () |
| Returns RobWork instance used by the plugin. | |
| virtual rw::core::Log & | log () |
| returns the RobWorkStudio log instance | |
| virtual void | setLog (rw::core::Log::Ptr log) |
| Sets the log to use. More... | |
| const rw::kinematics::State & | getState () |
| get current state of RobWorkStudio | |
| void | setState (const rw::kinematics::State &state) |
| set current state of RobWorkStudio | |
Additional Inherited Members | |
| Public Slots inherited from RobWorkStudioPlugin | |
| void | showPlugin () |
| toggles the visibility of the plugin | |
| Protected Member Functions inherited from RobWorkStudioPlugin | |
| boost::tuple< QWidget *, QAction *, int > | getAction (QWidget *widget, const std::string &actionName) |
| Find action in widget with name actionName . More... | |
| boost::tuple< QWidget *, QMenu *, int > | getMenu (QWidget *widget, const std::string &menuName) |
| Find menu in widget with name menuName . More... | |
| boost::tuple< QMenu *, QAction *, int > | getAction (QWidget *widget, const std::string &actionName, const std::string &actionName2) |
| Find action, actionName2, in menu, actionName, in a widget. More... | |
| Protected Attributes inherited from RobWorkStudioPlugin | |
| QAction | _showAction |
| ! More... | |
| QString | _name |
| ! More... | |
| RobWorkStudio * | _studio |
| ! More... | |
| rw::core::RobWork::Ptr | _robwork |
| ! More... | |
| rw::core::Log::Ptr | _log |
| ! More... | |
Plugin for visualization of assembly operations.
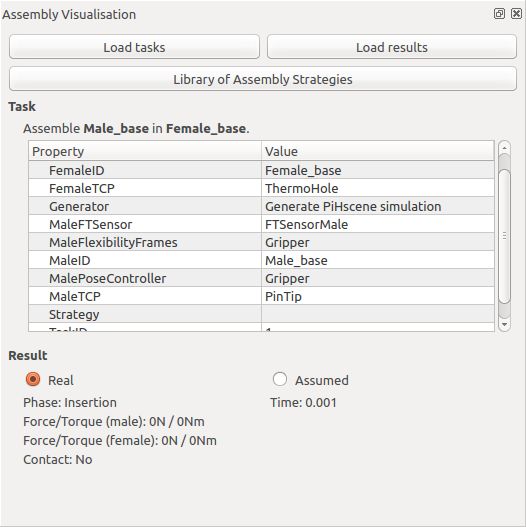
This plugin works best when used together with the rws::PlayBack plugin but can be compiled and used independently. When a workcell is loaded, the assembly task definition and results can be loaded in the plugin. If the result includes trajectory information, this can be shown with the playback plugin. The information under the result section, will be updated based on the time step chosen in the playback plugin. This plugin will also add additional renders to the RobWorkStudio scene, for rendering of contact and force/torque information stored in the assembly task and result.
It is possible to show a library of assembly strategies with the StrategyLibraryDialog. This dialog will also help set up a new assembly task definition if needed.
To use the plugin, create a RobWorkStudio.ini file in the RobWorkStudio/bin/debug folder with the following content (for debug build):
|
virtual |
called when a workcell is opened
| workcell | [in] that has been loaded |
Reimplemented from RobWorkStudioPlugin.